Blog Highlights
-
Software is becoming a key value generator for Variable Frequency Drives.
-
New control algorithm development is driven by new motor designs, new semiconductor switches, and more powerful processors.
-
System-level interoperability requirements are constantly expanding.
-
Modular power converter design has become a standard.
-
Grid code compliance is becoming a requirement.
-
Software lifecycle maintenance complexity is exploding.
Today, nearly 70% of all industrial electricity is consumed by electric motors. However, only a small percentage of these drives are variable frequency drives (15%-20% EU, 12% Germany, 5% worldwide). It is estimated that full penetration of Variable Frequency Drives (VFD) would reduce our electricity consumption by up to 6%.
In addition to improved efficiency, advanced variable frequency drives create extra value from their enhanced software features where advanced sensing, cloud interfaces, and AI technologies increase the drive’s ease of use, situational awareness, interoperability (both with other drives and with industrial processes) as well as enhanced fault prediction functionality.
Indeed, the 4th Industrial Revolution (or Industry 4.0 or Industrial IoT) is transforming motor drives into intelligent and rapidly evolving edge devices with formidable computational power that enables extensive data analytics capability, seamless sensor connectivity, communication gateway capability (enabling ease of connecting the drive with the cloud, sensors, neighboring drives, etc.) and thus unlocking new use cases and value generation streams for both OEMs and operators. Indeed, Industrial IoT opens a vast new field of opportunities for data-driven process optimization services.
Software is emerging as a key differentiator and value generator for VFD manufacturers. On one side, intelligent drives maximize ease of use, versatility, and application space, boost interoperability, and improve performance. But on the other side, it brings challenges such as the need for rapid adoption of advanced software development tools and practices in order to meet shrinking time-to-market requirements, limited development budgets, and a shortage of engineering talent.
Hardware in the Loop (HIL) testing and model-based design and testing practices have been demonstrated to improve project schedule performance by 32%, reduce the number of software bugs by 70%, and enable teams to produce 42% more code compared to the ones that didn’t use HIL.
Let us look into 6 key reasons for the rapid adoption of model-based HIL testing.
1. Control software is becoming a key value generator
Today motor drives are undergoing a similar transformation the cars have undergone over the past decade; they have become literally “supercomputers” on wheels while the complexity of automotive software has increased more than 10 times in 10 years.
Traditionally, motor drive controllers were compact embedded devices comprising a fast controller (cascaded type comprising modulator and current/torque/speed/position loops), and a fieldbus communication unit; both implemented on a bare metal DSP processor microcontroller often combined with a CPLD or FPGA.
Today, the core drive control functionality is vastly expanded with Industrial Ethernet and wireless communication; (predictive) diagnostics, fault detection and isolation, data analytics, machine learning, and process safety and optimization functions. Furthermore, the software is most often deployed on one or more CPUs running a real-time operating system and an FPGA.
Adding new software functionality is an opportunity for product differentiation and value generation without the need for long design cycles that are the hallmark of industrial drives development. It is a great opportunity for VFD product differentiation and new value generation.
Naturally, advanced software requires disciplined, state-of-the-art, model-based testing and lifecycle maintenance processes. Indeed, model-based HIL testing brings much-needed capability and shortens time to market, delivers better quality, and develops and maintains a larger code size. All that with smaller development and test teams and smaller lab testing expenses.
2. Need for new control algorithm developments
Although control of motor drives is considered mature, there is a constant push for new algorithm developments driven by:
- Support for new types of electric motors
- Deployment of new computationally demanding control algorithms (e.g. Model Predictive Control (MPC))
- Better fault detection, isolation, and runtime adaptation
- New semiconductor switches (e.g. wide-bandgap SiC and GaN devices) with faster-switching capability
- New or existing topologies that better leverage semiconductor features.
Driven by new applications and fueled by advanced Finite Element Analysis (FEA) software tools, such as JMAG-FEA, new and enhanced electric motor designs are constantly developed. These new designs require new and improved control algorithms that encompass control of both existing motor types/designs and new ones.
Faster embedded processors enable executing of high-performance control algorithms and more complex and demanding fault detection and isolation algorithms that were not computationally feasible until recently. In addition, wide-bandgap devices can operate at much higher switching frequencies and require more complex controls including faster execution rates. Multilevel topologies when used with wide-bandgap or silicon devices can deliver improved efficiency, performance, and smaller size and wait.
3. System-level interoperability requirements
While a typical high-performance drive controller today has around 200,000 standard lines of code (SLOC)—which is a little bit more than software size of a typical pacemaker or approximately one half of the Space Shuttle’s control software size—most VFD’s will operate networked with 10’s or 100’s of drives (from same or diverse manufacturers) and sensors; to interface with process level controllers; and to communicate with cloud applications without a glitch. Today most prevalent communication standards are Industrial Ethernet (IE) protocols that provide determinism and control, such as: EtherCAT, EtherNet/IP, PROFINET, Powerlink, and Modbus TCP.
These industrial networks with 100s of drives and sensors and process controllers easily exceed the total control code size of ~20M SLOC’s that becomes comparable to the Boeing 787 control software size.
This control code complexity, especially if we consider cybersecurity requirements, requires fully automated model based control software testing and verification processes. Hence the use of C-HIL becomes paramount to guarantee control software quality, seamless interoperability while managing the cost and complexity.
4. Modular power converter design
Most VFD’s are designed in modular fashion in order to cover wider range of power levels and performance requirements. Often, input stage can be configured using either passive front end or active front end modules. Power can be adjusted by paralleling multiple modules. DC link capacitor bank can be flexibly configured depending on the application. Similarly, inverter modules can be paralleled to increase the output power level.
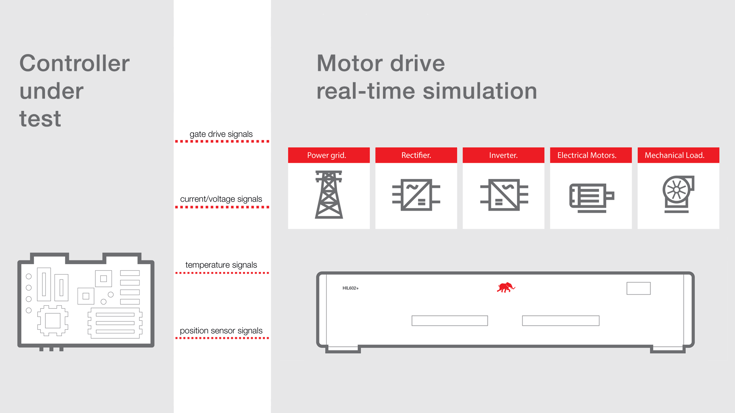
VFD controller has to guarantee seamless operation for any given drive configuration and to ensure stability and performance for all electric motor types and all load types under any operating condition.
Testing controller software for all configurations and under all operating conditions (including faults) can only be done efficiently using test automation coupled with C-HIL real-time simulation approach.
5. Grid code compliance
Today’s MV and HV drives have to meet more stringent power quality and grid codes: current/voltage distortion, power factor, flicker control, power quality and grid fault performance.
Testing against different grid codes that are constantly evolving is a daunting and expensive quality assurance task unless testing is automated with model based HIL approach.
6. Control software lifecycle maintenance complexity
Drives manufacturers today are facing a massive challenge to manage:
- growing control code complexity,
- expanding variety of products and product lines,
- management of all software/firmware changes across the lifecycle,
- growing infrastructure for remote deployment of software and firmware updates
- the competitive pressure to improve product functionality and quality
At the same time vendors are under relentless pressure to lower the cost and achieve results with ever-shrinking budgets and engineering teams.
These orthogonal requirements can only be met through adoption of the state of the art tools and processes from the software industry. For such tools to be effective, test rigs have to be transformed from physical laboratories to virtual hardware in the loop testbeds accessible from the cloud. Only then, software test automation and life cycle maintenance processes can be fully deployed and can bring all the benefits and savings.

Author | Ivan Celanovic
Visuals | Karl Mickei
Editor | Debora Santo
