Auf dem diesjährigen Microgrid & DER Controller Symposium stand die geistige Errungenschaft von Erik Limpaecher vom MIT Lincoln Laboratoy im Rampenlicht – der hoch wiedergabetreue Controller Hardware-in-the-Loop (HIL). Der glänzte nur so und eroberte die Herzen und Köpfe sämtlicher anwesender Energieingenieure.
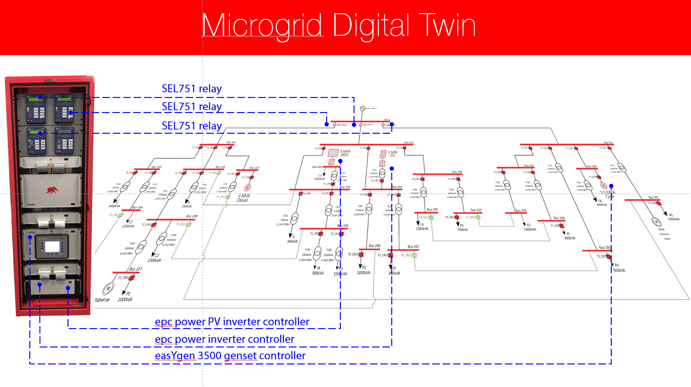
Auf dem Workshop-Podium waren die realen, unverfälschten industriellen Microgrid-Controller – von Eaton, GE, SEL und Schneider – in Aktion. Sie waren direkt vernetzt und steuerten das Microgrid Controller HIL Testbed. Dieses trieb eine Echtzeitsimulation an, die 3 Einspeiser mit 24 Bussen, einem Dieselgenerator, einem Naturgasgenerator mit Wärme-Kraft-Kopplung, einem Batteriespeicher, einem PV-Wechselrichter und zahlreichen Lasten beinhaltete.
Die Microgrid-Controller mussten mit vielfältigen Störungen zurechtkommen, darunter waren: verschiedene Defekte; Sonnenstrahlungsprofile, Belastungsprofile und Anfragen des Distribution Management Systems (DMS) an den Microgrid-Controller (z.B. zum Export von aktiver respektive reaktiver Leistung, zur Inselbildung usw.)
Während der Vorbereitung auf die Demo fürs Symposium, haben wir aus der Zusammenarbeit mit Anbietern von Microgrid-Controllern 6 Schlüssellektionen gelernt, die Ihnen künftig Entwicklung, Testung, Validierung und Integration erleichtern können:
- Nutzen Sie HIL.
- Beginnen Sie mit etwas Einfachem.
- Konfigurieren und testen Sie die Kommunikation mit HIL-Modellen.
- Testen Sie mit realen Controllern im Loop. Bauen Sie Vertrauen auf.
- Testen Sie kompromisslos.
- Testen Sie die Cyber-Sicherheit des Microgrid-Controllers.
Nutzen Sie HIL
Die Entwicklung und Testung von Microgrid-Controllern ist auch so schon schwierig genug. Entwicklung und Testung von Microgrid-Controllern ohne die richtigen Tools ist nahezu unmöglich. Heutzutage sieht die Entwicklung, Testung und Inbetriebnahme von Microgrid-Controllern für Anbieter ohne HIL-Plattform aus wie folgt:
- Sie simulieren eine Leistungsstufe durch einen Offline-Simulator (Berechnung meist stationärer Energiefluss) und erhalten so die Schutzeinstellungen (basierend auf eingeschränkter Analyse des stationären Zustands).
- Sie nutzen die Ergebnisse der Offline-Simulation als Ausgangspunkt für Programmierung und Konfiguration des Microgrid-Controllers.
- Sie gehen ins Feld und versuchen, den Microgrid-Controller zum Laufen zu bringen.
- Sie kämpfen während der Inbetriebnahme im Feld mit der Kommunikation zwischen Microgrid-Controller und DERs.
- Sie testen Grundfunktionalität und Schutz des Controllers und nehmen das Microgrid in Betrieb.
- Sie hoffen, dass Sie nicht zu bald eine Ausfallmeldung zum Microgrid erhalten.
Mit dem HIL-Microgrid-Testbed sehen Controller-Entwicklung und Testvorgang ganz anders aus:
- Sie konstruieren ein Modell der Microgrid-Leistungsstufe; Sie nutzen eine virtuelle HIL oder einen Offline-Simulator und erhalten so Schlüsselparameter des Microgrids.
- Sie nutzen Unit-Test-HIL-Modelle für einzelne DERs, um die Microgrid-Controller-Kommunikation zu konfigurieren und zu testen – für jede DER einzeln. (Und all dies, während Sie die behagliche Wärme ihres Büros genießen.)
- Sie testen den kompletten Microgrid-Controller mit Hilfe eines HIL-Echtzeitmodells des Microgrids (ohne jegliche reale Controller im Loop – das gesamte Microgrid wird inklusive Controller simuliert).
- Sie fügen dem Loop einen nach dem anderen Controller hinzu und fahren mit der Testung fort. Sie testen zunächst Grundfunktionalität und Schutz der Controller und gelangen dann zu komplexen Vorgängen wie Moduswechsel etc.
- Sie gehen entspannt zum Standort des Microgrids, downloaden die Controller-Firmware auf den Controller am Standort und schließen die Inbetriebnahme des Microgrid-Controllers voller Zuversicht ab.

Beginnen Sie mit etwas Einfachem.
Ein Microgrid ist ein komplexes System. Einerseits ist die Kommunikation zwischen Microgrid-Controller, DERs und Relais komplex (vielfältige Kommunikationsprotokolle) und nur dürftig standardisiert, andererseits bedingt das dynamische Verhalten von Generatoren und Lasten komplexes Systemverhalten.
Daher empfiehlt es sich für Entwicklung und Testung von Bedienelementen, mit einzelnen DER-Modellen zu beginnen (z.B. Batteriespeicher, Dieselgeneratoren etc.) und zunächst die Kommunikation zu testen sowie Messungen, Bezugsgrößen für die Testsettings und Schaltmodi zu kalibrieren. Dann erst sollte man zur Testung der Dynamik mit Hilfe desselben einfachen Build Level 0 Unit Tests übergehen.
Konfigurieren und testen Sie die Kommunikation mit HIL-Modellen.
Validierte, hoch wiedergabetreue Modelle von Microgrid-Komponenten einschließlich dynamischer Modelle der DERs und Relais haben Vorrang. Bei hoch wiedergabetreuen Simulationsmodellen gibt es zwei Seiten der Medaille:
- Wiedergabetreue des Kommunikationsmodells und
- Wiedergabetreue des dynamischen Modells
Testen Sie mit realen Controllern im Loop. Bauen Sie Vertrauen auf.
Wenn die Unit-Tests erst einmal alle abgeschlossen und die Kommunikationsprotokolle erstellt, funktionstüchtig und voll validiert sind, wird es Zeit für den nächsten Schritt: Build Level 1 (BL1)-Modelle.
Build Level 1 bedeutet, dass sich reale Controller im Loop mit der Simulation befinden. Zum Beispiel können sich reale Relais im Loop befinden, reale Wechselrichter-Controller, reale Aggregat-Controller etc.
Testen Sie kompromisslos.
Wenn der Microgrid-Controller einmal mit Build Level 0- und Build Level 1-Modellen konstruiert und getestet wurde, sind wir bereit, uns in die Qualitätstestung des gesamten Systems zu stürzen.
In dieser Phase beginnen wir, eine Bibliothek an automatisierten Testsequenzen aufzubauen, die Fehlerszenarien, verschiedene Systemstörungen und verschiedene Lasten- und Sonnenstrahlungsprofile beinhaltet.
Testen sie die Cyber-Sicherheit des Microgrid-Controllers.
Die Endphase vor der Inbetriebnahme ist die Testung der Cyber-Sicherheit des Microgrid-Controllers und der Kommunikation. Der Controller Hardware-in-the-Loop stellt ein perfektes Testbed für Testung und Validierung von Cyber-Sicherheit und des möglichen Einflusses einer Sicherheitsverletzung dar.
Tatsächlich ist die Kommunikations- und Steuerungsarchitektur identisch zu derjenigen in der finalen Hardware-Installation, da alle Controller sich im Loop befinden. Daher ist der Controller HIL die perfekte Spielwiese für die Testung und Validierung von Cyber-Sicherheit.
Mögen interessante Zeiten auf uns zukommen.
Als Zivilisation stehen wir erst am Anfang einer massiven Transformation, die zu einer kompletten Überarbeitung unserer Art der Produktion, Verteilung und Nutzung elektrischer Energie führen wird. Tatsächlich befinden wir uns inmitten der Transformation unserer Energienetzwerke zu belastbareren, flexibleren und zukunftsfähigeren Systemen. Dies geschieht durch Integration distribuierter Energieressourcen, Einführung erneuerbarer Energieerzeugung und fortschrittliche distribuierte Steuerung und Koordination.
Der einzige Weg, diese Ziele zu erreichen führt über die rasche Einführung neuer Entwurfsautomatisierungs (EDA – Electronic Design Automation)-Tools, zu denen die hoch wiedergabetreue Hardware-in-the-Loop(HIL)-Echtzeitsimulation gehört.





